工業(yè)自動(dòng)化的發(fā)展極大促進(jìn)了石化平臺(tái)自動(dòng)化的發(fā)展,石化企業(yè)的生產(chǎn)過程中,油品儲(chǔ)運(yùn)是其中很重要的組成片面,而儲(chǔ)運(yùn)自動(dòng)化則是發(fā)展的勢必方向[1] �。
儲(chǔ)罐的液位測量是儲(chǔ)運(yùn)自動(dòng)化的環(huán)節(jié),目前已經(jīng)擺脫了以“人工檢尺”為主的測量技巧,此法只作為校驗(yàn)工具而存在�����。從90 年代以來,隨著智能儀表的發(fā)展,罐區(qū)計(jì)量逐步走入自動(dòng)化平臺(tái),歷經(jīng)浮子鋼帶液位計(jì)�、靜壓式測量、伺服式液位計(jì)等測量儀表[2] ����。雷達(dá)液位計(jì)的出現(xiàn)是罐區(qū)計(jì)量的又一突破,其具有在線檢定和非接觸式測量的特點(diǎn),極大削減了儀表的維護(hù)工作。
1 雷達(dá)液位計(jì)原理
雷達(dá)液位計(jì)是一種行使高頻微波信號(hào)技術(shù)的非接觸式測量儀表���。天線發(fā)射的高頻電磁波經(jīng)過物面的反射,雷達(dá)儀表接收裝置檢測到返回的電磁波,計(jì)較出發(fā)射波和反射波的時(shí)間差或者頻率差,從而計(jì)較出物面的高度[3] ����。
電磁波遇到被測物質(zhì)容易被反射,被測介質(zhì)的介電常數(shù)越大,反射回波越強(qiáng)。雷達(dá)液位計(jì)的主要組成片面是信號(hào)發(fā)生器���、發(fā)射裝置����、天線��、接收裝置�����、信號(hào)處理單元等,其測量原理如下:假設(shè)d 是介質(zhì)物面與罐頂距離,F 是儲(chǔ)罐高度,則可以得出物位L 的計(jì)較式為:
L = F - d (1)
1)如若雷達(dá)液位計(jì)測量原理為時(shí)域脈沖法(Time Domain Reflectometry,TDR),雷達(dá)液位計(jì)測量脈沖往返被測介質(zhì)物面的時(shí)間為Δt,則相應(yīng)計(jì)較d 得
d = cΔt / 2 (2)
其中:c 為電磁波在儲(chǔ)罐中傳播的速度,即為光速��。
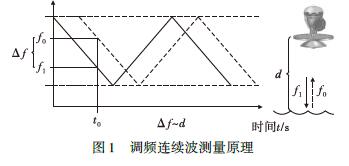
2)如若雷達(dá)液位計(jì)測量原理為調(diào)頻連續(xù)波(Frequency Modulated Continuous Wave,FMCW),原理如圖1 所示���。2019 年第5 期 工業(yè)儀表與自動(dòng)化裝置調(diào)頻連續(xù)波(FMCW)是經(jīng)過線性調(diào)制的,其特點(diǎn)為隨著時(shí)間的推移,天線發(fā)射的電磁波頻率會(huì)呈現(xiàn)某范圍內(nèi)的線性增長趨勢,線性增益為k���。當(dāng)接收裝置接收到電磁波時(shí),頻率接收和發(fā)射時(shí)勢必存在頻率差Δf,有關(guān)系式
Δt = Δf / k (3)
根據(jù)Δf 計(jì)較出時(shí)間Δt,將式(3) 代入式(2)中得:
d = cΔf / 2k (4)
由式(4)可以看出,根據(jù)物位回波信號(hào)與發(fā)射信號(hào)的頻率差即可測出距離。距離d 與Δf 成正比,即Δf 越大,則d 越大,相應(yīng)物位L 越小��。由上述兩種技巧對(duì)比,FMCW 技巧將直接測量時(shí)間差轉(zhuǎn)換為測量里面產(chǎn)生的頻率差,FMCW 法相較TDR 法具有更高的測量精度[4] �??稍O(shè)置里面參考頻率,使用數(shù)字晶體振蕩器控制輸出頻率,以保證雷達(dá)頻率變更的更加線性�����。
2 雷達(dá)液位計(jì)設(shè)計(jì)及應(yīng)用
2. 1 雷達(dá)液位計(jì)分類及選型
雷達(dá)液位計(jì)依據(jù)不同的分類原則有不同的分類結(jié)果,但目前主要的分類為兩種,一是依據(jù)計(jì)量精度分類,二是依據(jù)天線類型分類�����。按照計(jì)量精度分類,雷達(dá)液位計(jì)分為計(jì)量級(jí)和過程級(jí),計(jì)量級(jí)精度高于過程級(jí)精度,計(jì)量級(jí)精度可達(dá)0.5 ~1 mm,而過程級(jí)精度為3 ~10 mm 或者更大����。上述提到的兩種雷達(dá)液位計(jì)測量原理,其中時(shí)域脈沖法測量較為簡單,其計(jì)量誤差會(huì)較大;而針對(duì)調(diào)頻連續(xù)波技巧,時(shí)間差是由頻率差計(jì)較得來,頻率差是線性增益,故求取誤差較小�。因而,在采用雷達(dá)液位計(jì)進(jìn)行過程控制時(shí),若要求精度不需要太高,則測量原理普通為時(shí)域脈沖法;如果用于貿(mào)易結(jié)算時(shí),需要采用精度高的計(jì)量級(jí),其測量原理普通為調(diào)頻連續(xù)波法。
1)雷達(dá)液位計(jì)的聚焦和靈敏度由天線外形決定,依據(jù)雷達(dá)液位計(jì)的天線分類,主要有以下幾種[5] :
(1)喇叭口天線
喇叭口天線適用于大多數(shù)情況,常見于設(shè)計(jì)安裝在拱頂儲(chǔ)罐上,其聚焦特性好(瀝青或者相似產(chǎn)品不建議使用)����。此類天線的發(fā)射角與喇叭口直徑和頻率相關(guān),相像頻率下,直徑越大,其發(fā)射角越小,聚焦能力越強(qiáng)。
(2)拋物面天線
拋物面天線尺寸較大,電磁波能量集中,量程大,測量精度高,但硫磺��、瀝青等在較高溫度下容易在天線上附著結(jié)焦��。
(3)陣列天線
陣列天線采用平面陣列技術(shù),即多點(diǎn)發(fā)射源,與單點(diǎn)發(fā)射源相比,由于其測量基于一個(gè)平面而不是一個(gè)確定的點(diǎn),故方向性好,可以與導(dǎo)波管配套使用�。
2)天線是雷達(dá)液位計(jì)的環(huán)節(jié)部件,對(duì)于天線形式的選定在液位測量系統(tǒng)中格外重要,雷達(dá)液位計(jì)選型普通考慮如下幾方面:
(1)雷達(dá)的選型首先決定于罐區(qū)儲(chǔ)罐的容量,對(duì)于大容量的儲(chǔ)罐,要選定可靠性較高的液位測量儀表。
(2)對(duì)于在罐區(qū)用于長輸管道輸送�、裝船等進(jìn)行貿(mào)易結(jié)算的計(jì)量,其雷達(dá)液位計(jì)應(yīng)選用計(jì)量級(jí)型�����。
(3)根據(jù)儲(chǔ)罐的形式選定合適的天線,如儲(chǔ)罐為內(nèi)浮頂罐,則雷達(dá)液位計(jì)須配用導(dǎo)波式,相配的天線類型為陣列天線�。
(4)依據(jù)存儲(chǔ)介質(zhì)的性質(zhì)選用合適的天線類型,如介電常數(shù)較低時(shí)選用拋物面天線,可以到達(dá)較好的測量目的����。
(5)選型時(shí)根據(jù)被測介質(zhì)介電常數(shù)、液面狀況和操縱條件等選定合適的過程接口��。
2. 2 雷達(dá)液位計(jì)項(xiàng)目應(yīng)用
項(xiàng)目中為常溫汽油內(nèi)浮頂罐(20 000 m3 ),外形尺寸(38 000 × 17 820) mm,液位測量采用ROSEMENT5900 系列雷達(dá)液位計(jì),選用帶導(dǎo)波管陣列天線,信號(hào)發(fā)射頻率在10 GHz 左右,微波功率小于1 mW�。汽油介電常數(shù)在1. 9 左右,根據(jù)具體工況,雷達(dá)液位計(jì)選用8 寸法蘭連接。
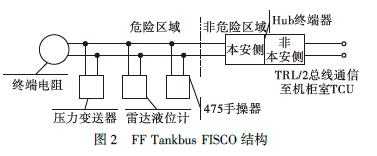
5900 系列雷達(dá)液位計(jì)現(xiàn)場設(shè)備由兩片面組成:液位變送器和儲(chǔ)罐Hub 終端���。液位變送器由Hub回路供電,數(shù)據(jù)通信采用FF Tankbus 現(xiàn)場總線協(xié)議,本質(zhì)安全的FF Tankbus 符合FISCO Foundation 現(xiàn)場總線標(biāo)準(zhǔn),為測得儲(chǔ)罐內(nèi)液體的密度,在罐底設(shè)置壓力變送器,壓力變送器采用相應(yīng)FF 總線通信至儲(chǔ)罐Hub����。本質(zhì)安全FISCO 菊花鏈結(jié)構(gòu)如圖2 所示�。如圖2 所示,儲(chǔ)罐Hub 有2 個(gè)腔體,分為本安和非本安片面,本安側(cè)為連接現(xiàn)場設(shè)備的FF Tankbus現(xiàn)場總線,非本安側(cè)TRL/2 總線通信至機(jī)柜室TCU。該項(xiàng)目雷達(dá)液位計(jì)應(yīng)用于過程控制中,若應(yīng)用于安全儀表系統(tǒng)時(shí),在SIL1 情況下,儀表里面有且只有一個(gè)終端電阻,而在SIL2 和SIL3 情況下,不設(shè)置終端電阻�����。
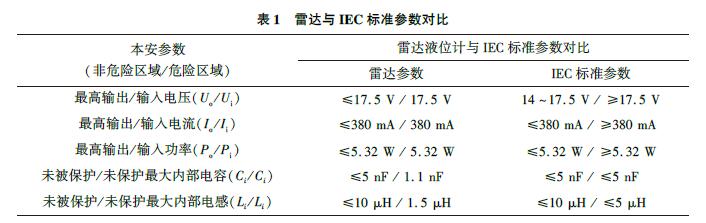
依據(jù)《IEC 60079 - 27:Fieldbus intrinsically safeconcept ( FISCO)》, FISCO 應(yīng)滿足相應(yīng)條件[6] ,ROSEMENT 5900 系列各參數(shù)與IEC�。為符合現(xiàn)場應(yīng)用要求,項(xiàng)目中FF Tankbus 電纜采用1. 5 mm2屏蔽雙絞電纜�。儲(chǔ)罐Hub 與機(jī)柜室內(nèi)TCU2460(儲(chǔ)罐通信單元)之間的物理層協(xié)議采用專用TRL/2 總線,其采用的頻移數(shù)字通信技術(shù)抗干擾性強(qiáng),通信距離遠(yuǎn)�����。實(shí)際項(xiàng)目中電纜***遠(yuǎn)通信距離2. 5 km��。作為將現(xiàn)場眾多設(shè)備連接成整體的TCU,考慮其重要性,設(shè)計(jì)為冗余����。
3 安裝要求及導(dǎo)波管制作
3. 1 雷達(dá)液位計(jì)安裝要求
雷達(dá)液位計(jì)的安裝位置影響測量精度,應(yīng)充分注意以下問題:
1)雷達(dá)液位計(jì)儲(chǔ)罐開口位置離開儲(chǔ)罐內(nèi)壁距離大于雷達(dá)液位計(jì)安裝法蘭面距儲(chǔ)罐底板高度的15%,使用導(dǎo)波管無此限制����。
2)為保證信號(hào)波無阻礙進(jìn)入儲(chǔ)罐里面,雷達(dá)液位計(jì)接口的法蘭及連接管的總長度小于250 mm。
3)若有導(dǎo)波管,導(dǎo)波管應(yīng)垂直向下,允許偏差≤0.5°;水平度應(yīng)為±1°����。
4)安裝時(shí)考慮儲(chǔ)罐頂板強(qiáng)度,以免造成顛簸位移。
5)雷達(dá)波路徑應(yīng)避過里面障礙物,如支撐架��、加熱管及攪拌器等����。
6)考慮液位條件,如避開進(jìn)料口產(chǎn)生的紊流及泡沫。
3. 2 導(dǎo)波管制作要求
當(dāng)儲(chǔ)罐為浮頂罐或球罐時(shí),應(yīng)使用導(dǎo)波管;在介質(zhì)液面顛簸或產(chǎn)生泡沫時(shí)也應(yīng)考慮加導(dǎo)波管��。導(dǎo)波管不隨設(shè)備成套購買,宜在現(xiàn)場由施工單位根據(jù)具體工況制作,導(dǎo)波管制作具體要求如下:
1)導(dǎo)波管材質(zhì)應(yīng)為不銹鋼或碳鋼,球罐時(shí)必須為不銹鋼。
2)導(dǎo)波管應(yīng)為整根,若需加長,須用外夾套焊接技巧,間隙小于1. 0 mm,焊接內(nèi)壁不能有焊縫及毛刺,否則影響測量精度��。
3)導(dǎo)波管底距罐底板為100 ~ 150 mm,并加傾斜45°雷達(dá)反射板�。
4)為保證導(dǎo)波管內(nèi)外等液位,導(dǎo)波管須間隔距離交叉開孔,導(dǎo)波管內(nèi)平面需平滑,否則容易產(chǎn)生虛假液位的現(xiàn)象。開孔尺寸應(yīng)適宜,不宜過大,以免造成管內(nèi)液位顛簸;也不宜過小,不能有效保證導(dǎo)波管內(nèi)外液位一致�����。依據(jù)工程經(jīng)驗(yàn),開孔總尺寸與導(dǎo)波管直徑尺寸對(duì)應(yīng)如表2 所示����。也即是MEMS 傳感器向前傾斜的角度。隨著連接的降水,在14 ∶ 00 ~ 2 ∶ 00 時(shí)邊坡的形變較為穩(wěn)定,MEMS 傳感器的合成傾角速率為0. 076°/ h; 在2 ∶ 00 ~6 ∶ 00時(shí)邊坡的形變加劇,但MEMS 傳感器的合成傾角速率為0. 91°/ h���?�?梢钥闯鯶 軸變更明顯,X 軸則沒有太大變更,這是由于此時(shí)邊坡的下滑相比于水平的變更更為劇烈,此時(shí)應(yīng)發(fā)出邊坡失穩(wěn)預(yù)警;6: 00 后MEMS 傳感器的各個(gè)傾角速率都驟然上升,這時(shí)邊坡已經(jīng)失穩(wěn),產(chǎn)生了滑坡�。
4 結(jié)語
該文設(shè)計(jì)了一種基于4G 無線傳輸?shù)墓愤吰卤O(jiān)測傳感系統(tǒng),包含數(shù)據(jù)采集與發(fā)射裝置和MEMS傾角傳感器,可實(shí)現(xiàn)全天候無人監(jiān)測及數(shù)據(jù)遠(yuǎn)距離傳輸功效��。辦理了人工成本過高和數(shù)據(jù)難以遠(yuǎn)距離傳輸?shù)葐栴}��。此外,該文還使用4G 無線傳輸技術(shù)將終端報(bào)警與短信提示預(yù)警相結(jié)合,提高了預(yù)警效果���。最終通過實(shí)驗(yàn)驗(yàn)證所設(shè)計(jì)的系統(tǒng)可穩(wěn)定工作,滿足設(shè)計(jì)要求����。